[ICP]Introduction to Computational Physics
Professor: Andreas Adelmann
1. Random Number Generator
Congruential RNG
x i = ( c x i − 1 ) m o d p x_i = (cx_{i-1})mod~p
x i = ( c x i − 1 ) m o d p
maximal period is p − 1 p-1 p − 1 c p − 1 m o d p = 1 c^{p-1}mod~p = 1 c p − 1 m o d p = 1
Lagged Fibonacci RNG
x b + 1 = ( ∑ j ∈ J x b + 1 − j ) m o d 2 j ⊂ { 1 , ⋯ , b } x_{b+1} = (\sum_{j\in\mathcal J}x_{b+1-j}) mod ~ 2\\
j\subset\{1,\cdots, b\}
x b + 1 = ( j ∈ J ∑ x b + 1 − j ) m o d 2 j ⊂ { 1 , ⋯ , b }
initial sequence at least c c c
usually use congruential RNG to obtain seed sequence
When ∣ j ∣ = 2 |j| = 2 ∣ j ∣ = 2
x i + 1 = ( x i − c + x i − d ) m o d 2 c , d ∈ { 1 , ⋯ , i − 1 } x_{i+1} = (x_{i-c}+x_{i-d}) mod ~ 2
\\
c,d\in\{1,\cdots, i-1\}
x i + 1 = ( x i − c + x i − d ) m o d 2 c , d ∈ { 1 , ⋯ , i − 1 }
max period: 2 c − 1 2^c - 1 2 c − 1
Zierler-Trinomial condition
1 + z c + z d 1+z^c+z^d 1 + z c + z d ( c , d ) = ( 250 , 103 ) (c,d) = (250,103) ( c , d ) = ( 250 , 103 )
Square/Cubic Test
square test:( s i , s i + 1 ) (s_i, s_{i+1}) ( s i , s i + 1 )
cubic test: ( s i , s i + 1 , s i + 2 ) (s_i, s_{i+1}, s_{i+2}) ( s i , s i + 1 , s i + 2 )
χ 2 \chi^2 χ 2 fluctuation of mean value, mean value should be gaussian
χ 2 = ∑ i = 1 k N i − n k n k \chi^2 = \sum_{i=1}^k\frac{N_i-\frac{n}{k}}{\frac{n}{k}}
χ 2 = i = 1 ∑ k k n N i − k n
n n n
N i N_i N i
k k k
Monte Carlo
expected error for MC sampling is O ( 1 N ) \mathcal O(\frac{1}{\sqrt N}) O ( N 1 )
error bound in quasi-MC is O ( ( l o g N ) d N ) \mathcal O(\frac{(log~N)^d}{N}) O ( N ( l o g N ) d )
D-star Discrepency
D N ∗ = m a x 0 ≤ v j ≤ 1 ∣ 1 N ∑ i = 1 N ∏ j = 1 d 1 0 ≤ x j i ≤ v j − ∏ j = 1 d v j ∣ D^*_N = \underset{0\le v_j \le 1}{max}\left|\frac{1}{N}\sum_{i=1}^N\prod_{j=1}^d1_{0\le x_j^i \le v_j} - \prod_{j=1}^dv_j\right|
D N ∗ = 0 ≤ v j ≤ 1 ma x N 1 i = 1 ∑ N j = 1 ∏ d 1 0 ≤ x j i ≤ v j − j = 1 ∏ d v j
it measure how dense the points distributed inside a given volume
N N N { x 1 , ⋯ , x n } \{x^1,\cdots,x^n\} { x 1 , ⋯ , x n }
d d d
low-discrepancy : D N ∗ ≤ c ( d ) l o g ( N ) d N D^*_N \le c(d)\frac{log(N)^d}{N} D N ∗ ≤ c ( d ) N l o g ( N ) d
given uniform distribution X , Y ∼ U n i f ( 0 , 1 ) X,Y\sim Unif(0,1) X , Y ∼ U ni f ( 0 , 1 )
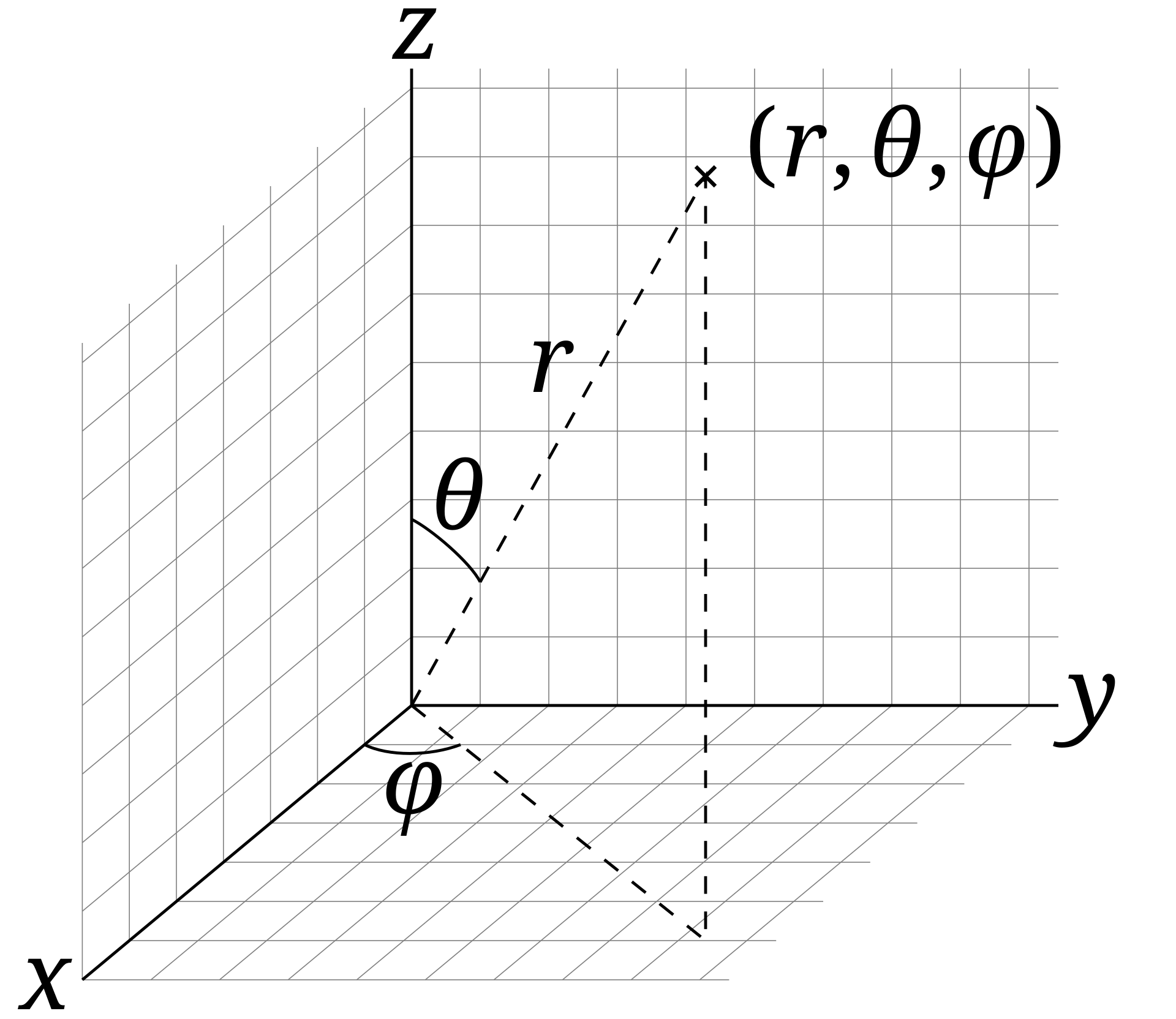
∫ 0 X ∫ 0 Y d x d y = ∫ 0 Φ ∫ 0 Θ 1 4 π s i n θ d ϕ d θ ⇒ X Y = 1 4 π ( 1 − c o s Θ ) Φ \int_0^X\int_0^Y dxdy = \int_0^\Phi\int_0^\Theta \frac{1}{4\pi} sin\theta d\phi d\theta
\\
\Rightarrow XY = \frac{1}{4\pi}(1-cos\Theta)\Phi
∫ 0 X ∫ 0 Y d x d y = ∫ 0 Φ ∫ 0 Θ 4 π 1 s in θ d ϕ d θ ⇒ X Y = 4 π 1 ( 1 − cos Θ ) Φ
let Φ = 2 π X \Phi = 2\pi X Φ = 2 π X Θ = a c o s ( 1 − 2 Y ) \Theta = acos(1-2Y) Θ = a cos ( 1 − 2 Y )
∴ S ∼ [ R s i n Θ c o s Φ , R s i n Θ s i n Φ , R c o s Θ ] \therefore S\sim [Rsin\Theta cos\Phi, Rsin\Theta sin\Phi, Rcos\Theta] ∴ S ∼ [ R s in Θ cos Φ , R s in Θ s in Φ , R cos Θ ]
rejection sampling, sample X ∼ U n i f ( − a , a ) , Y ∼ U n i f ( − b , b ) X\sim Unif(-a, a), Y\sim Unif(-b,b) X ∼ U ni f ( − a , a ) , Y ∼ U ni f ( − b , b )
draw X , Y ∼ U n i f ( 0 , 1 ) X,Y\sim Unif(0,1) X , Y ∼ U ni f ( 0 , 1 ) ψ = a t a n ( b a t a n ( 2 π X ) ) \psi = atan(\frac{b}{a}tan(2\pi X)) ψ = a t an ( a b t an ( 2 π X )) r = Y a b ( b c o s ψ ) 2 + ( a sin ψ ) 2 r = \sqrt Y \frac{ab}{\sqrt{(b cos\psi)^2 + (a\sin\psi)^2}} r = Y ( b cos ψ ) 2 + ( a s i n ψ ) 2 ab E ∼ [ r c o s ψ , r s i n ψ ] E\sim [rcos\psi, rsin\psi] E ∼ [ rcos ψ , rs in ψ ]
y 1 = − σ l n ( 1 − z 2 ) s i n ( 2 π z 1 ) y 2 = − σ l n ( 1 − z 2 ) c o s ( 2 π z 1 ) y_1 = \sqrt{-\sigma~ln(1-z_2)}sin(2\pi z_1)\\
y_2 = \sqrt{-\sigma~ln(1-z_2)}cos(2\pi z_1)
y 1 = − σ l n ( 1 − z 2 ) s in ( 2 π z 1 ) y 2 = − σ l n ( 1 − z 2 ) cos ( 2 π z 1 )
using uniform z 1 z_1 z 1 z 2 z_2 z 2 y 1 y_1 y 1 y 2 y_2 y 2
2. Percolation
cirtical point p c p_c p c : occupation probabilty p p p
percolation strength β \beta β : P ( p ≳ p c ) ∼ ∣ p − p c ∣ β P(p\gtrsim p_c) \sim |p-p_c|^\beta P ( p ≳ p c ) ∼ ∣ p − p c ∣ β
wrapping probability : W ( p ) = { 0 0 ≤ p < p c 1 p c < p ≤ 1 W(p) = \begin{cases}0 & 0\leq p<p_c \\ 1 & p_c< p\le 1\end{cases} W ( p ) = { 0 1 0 ≤ p < p c p c < p ≤ 1
cluster-size distribution : n s ( p ) = l i m L → ∞ N s ( p , L ) L n_s(p)=\underset{L\rightarrow \infin}{lim}\frac{N_s(p,L)}{L} n s ( p ) = L → ∞ l im L N s ( p , L ) N s ( p , L ) N_s(p,L) N s ( p , L ) s s s p p p L L L
Burning Method
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 def burning_method (lattice ):""" lattice: np.ndarray[L, L] 0 means empty, 1 means occupied """ 2 0 , lattice[0 , :] == 1 ] == twhile True :1 False for node in np.where(lattice == t):for neighbor in get_neighbors(node):if lattice[neighbor] == 1 :True 0 ] == lattice.shape[0 ] - 1 ).any ()if not has_changed or at_bottom:break
Hoshen-Kopelman Algorithm
compute how many clusters
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 def hoshen_kopelman_algorithm (lattice ):""" lattice: np.ndarray[L, L] 0 means empty, 1 means occupied """ None , None ] 2 for i in range (lattice.shape[0 ]):for j in range (lattice.shape[1 ]):if is_top_and_left_empty(lattice[i, j]): 1 )1 else is_top_left_same_cluster(lattice[i, j]): 1 else :
3. Fractals
fractal dimension d f d_f d f : stretch the object by a a a a d f a^{d_f} a d f
V ε ∗ ε d = ( L ε ) d f \frac{V_\varepsilon^*}{\varepsilon^d} = \left(\frac{L}{\varepsilon}\right)^{d_f}
ε d V ε ∗ = ( ε L ) d f
correlation function c ( r ) c(r) c ( r ) : number of filled sites with in sphere r r r Δ r \Delta r Δ r
c ( r ) ∝ { C + e x p ( − r ξ ) p < p c r − ( d − 2 + η ) p ≈ p c c(r) \propto \begin{cases}
C + exp(-\frac{r}{\xi}) & p<p_c\\
r^{-(d-2 + \eta)} & p\approx p_c
\end{cases}
c ( r ) ∝ { C + e x p ( − ξ r ) r − ( d − 2 + η ) p < p c p ≈ p c
ξ \xi ξ
ξ ∝ ∣ p − p c ∣ ν w h e r e ν = { 4 3 2 d 0.88 3 d \xi \propto |p-p_c|^\nu~where~\nu=\begin{cases}\frac{4}{3}&2d \\ 0.88 & 3d\end{cases}
ξ ∝ ∣ p − p c ∣ ν w h ere ν = { 3 4 0.88 2 d 3 d
η = { 5 24 2 d − 0.05 3 d \eta = \begin{cases} \frac{5}{24} & 2d \\ -0.05 & 3d\end{cases}
η = { 24 5 − 0.05 2 d 3 d
d f = d − β ν d_f = d - \frac{\beta}{\nu}
d f = d − ν β
β \beta β
d d d
Sandbox Method
1 2 3 4 5 6 7 8 9 10 11 12 def sandbox_method (lattice ):""" lattice: np.ndarray[L, L] 0 means empty, 1 means occupied """ 0 ]/2 - 1 for r in range (1 , int (L//2 )): sum (lattice[c-r:c+r, c-r:c+r]==1 ))
Box Counting Method
1 2 3 4 5 6 7 8 9 10 11 12 13 def box_counting_method (lattice ):""" lattice: np.ndarray[L, L] 0 means empty, 1 means occupied """ for epsilon in range (1 , lattice.shape[0 ]):0 ) sum (boxes > 0 ))1 / epsilon)
4. Cellular Automata
cellular automata:( L , ψ , R , N ) (\mathcal L, \psi, R,\mathcal N) ( L , ψ , R , N )
L \mathcal L L d d d
ψ \psi ψ m m m t t t
R R R m m m ψ \psi ψ
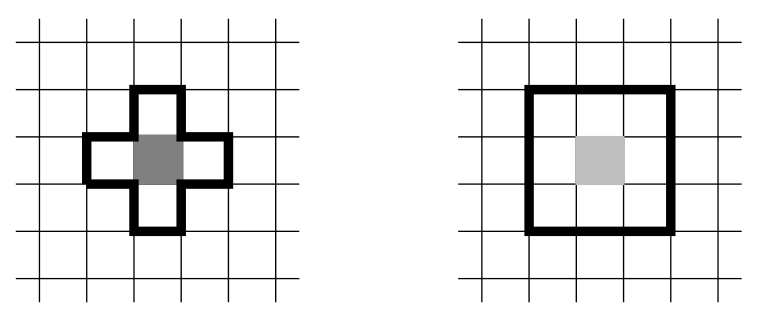
neighborhoods
left:Von Neumann neighborhood : 4 (north-east-south-west)
right:Moore neighborhood : 8 (3x3 region)
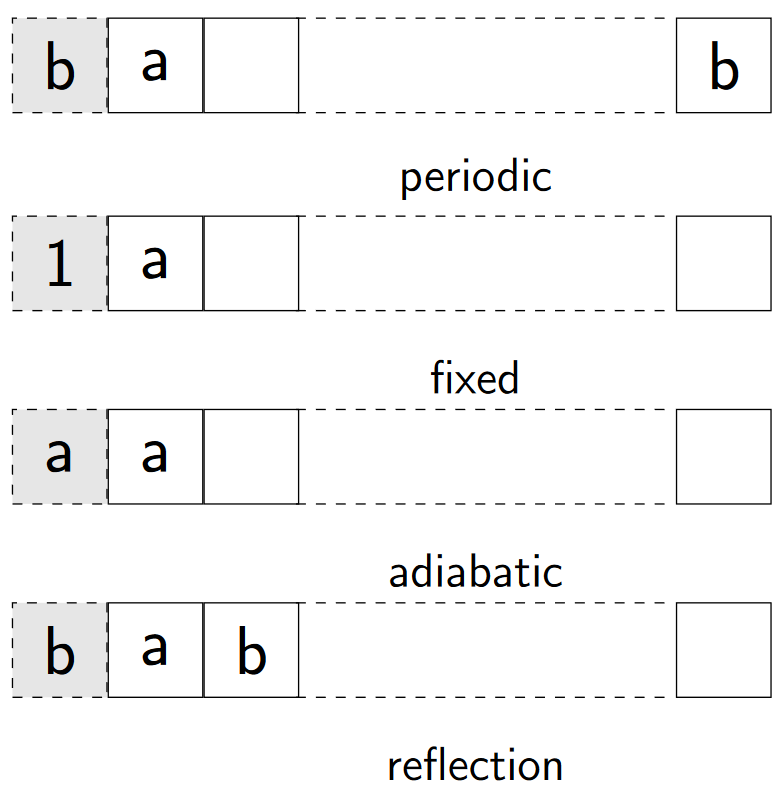
boundary conditions
assume x[1:] is the actual space
periodic : x[0] = x[-1]fixed : x[0] = Cadiabtic : x[0] = x[1]reflection: x[0] = x[2]
Game of Life
moore neighborhood
n < 2 n < 2 n < 2 n = 2 n = 2 n = 2 n = 3 n = 3 n = 3 n > 3 n>3 n > 3
Langton Ant
enter white cell, turn left and paint cell gray
enter gray cell, turn right and paint cell white
observation
chaotic phase of about 10000 steps
formation highway
walking on highway
Traffic Models
( ψ i − 1 , ψ i , ψ i + 1 ) t → ( ψ i ) t + 1 (\psi_{i-1},\psi_i,\psi_{i+1})_t \rightarrow (\psi_i)_{t+1}
( ψ i − 1 , ψ i , ψ i + 1 ) t → ( ψ i ) t + 1
rule \( ψ i − 1 ψ i ψ i + 1 ) t (\psi_{i-1}\psi_{i}\psi_{i+1})_t ( ψ i − 1 ψ i ψ i + 1 ) t
111
110
101
100
011
010
001
000
184 ( ψ i ) t (\psi_{i})_t ( ψ i ) t
1
0
1
1
1
0
0
0
Gas of Particles ( HPP model )
ψ ( r , t ) = ( 1011 ) \psi(r, t) = (1011) ψ ( r , t ) = ( 1011 )
5. Monte Carlo Method
Error
Δ ∝ 1 N \Delta \propto \frac{1}{\sqrt N}
Δ ∝ N 1
π \boldsymbol \pi π π ( N ) = 4 N c ( N ) N \pi(N) = 4\frac{N_c(N)}{N}\\
π ( N ) = 4 N N c ( N )
N c N_c N c
Monte Carlo Integral
∫ a b g ( x ) d x ≈ b − a N ∑ i = 1 N g ( x i ) ≡ Q \int_a^b g(x)dx \approx \frac{b-a}{N}\sum_{i=1}^N g(x_i) \equiv Q
∫ a b g ( x ) d x ≈ N b − a i = 1 ∑ N g ( x i ) ≡ Q
x i x_i x i [ a , b ] [a, b] [ a , b ]
N N N
error ∝ ( Δ x ) 2 ∝ N − 2 d \propto (\Delta x)^2 \propto N^{-\frac{2}{d}} ∝ ( Δ x ) 2 ∝ N − d 2
Center Limit Theorem
δ Q = ( b − a ) σ N = V σ N σ 2 = 1 N − 1 ∑ i = 1 N ( g ( x i ) − Q N ) \delta Q = (b-a) \frac{\sigma}{\sqrt{N}} = V\frac{\sigma}{\sqrt{N}}\\
\sigma^2 = \frac{1}{N-1}\sum_{i=1}^N
\left(g(x_i) - \frac{Q}{N}\right)
δ Q = ( b − a ) N σ = V N σ σ 2 = N − 1 1 i = 1 ∑ N ( g ( x i ) − N Q )
V V V
the error independent of dimension d d d
cirtical point
N − 2 d = c r i t 1 N N^{-\frac{2}{d}}\overset{crit}{=}\frac{1}{\sqrt{N}}
N − d 2 = cr i t N 1
for d > 4 d>4 d > 4
high dimension integration
hard-sphere, overlap → \rightarrow →
Importance Sampling
∫ a b f ( x ) d x ≈ 1 N ∑ i = 1 N f ( x i G ) g ( x i G ) \int_a^b f(x)dx \approx \frac{1}{N}\sum_{i=1}^N \frac{f(x_i^G)}{g(x_i^G)}
∫ a b f ( x ) d x ≈ N 1 i = 1 ∑ N g ( x i G ) f ( x i G )
x i G x_i^G x i G g ( x ) g(x) g ( x )
G ( x ) G(x) G ( x ) g ( x ) g(x) g ( x ) G ( x ) = ∫ a x g ( x ) d x G(x) = \int_a^x g(x)dx G ( x ) = ∫ a x g ( x ) d x
f f f g g g
Control Variates
∫ a b f ( x ) d x = ∫ a b ( f ( x ) − g ( x ) ) d x + ∫ a b g ( x ) d x \int_a^b f(x)dx = \int_a^b (f(x)-g(x))dx + \int_a^b g(x)dx
∫ a b f ( x ) d x = ∫ a b ( f ( x ) − g ( x )) d x + ∫ a b g ( x ) d x
f f f g g g
V a r ( f − g ) < V a r ( f ) Var(f-g) < Var(f) Va r ( f − g ) < Va r ( f ) ∫ a b g ( x ) d x \int_a^b g(x)dx ∫ a b g ( x ) d x
Quasi Monte Carlo
D N ∗ = O ( ( l o g N ) d N ) D^*_N = \mathcal O\left(\frac{(log N)^d}{N}\right)
D N ∗ = O ( N ( l o g N ) d )
O ( ( l o g N ) d N ) < O ( 1 N ) ⇒ N > 2 d \mathcal O(\frac{(logN)^d}{N}) < \mathcal O(\frac{1}{\sqrt{ N}}) \Rightarrow N > 2^d
O ( N ( l o g N ) d ) < O ( N 1 ) ⇒ N > 2 d
Markov Chain
d p ( X , τ ) d τ = ∑ Y ≠ X p ( Y ) W ( Y → X ) − ∑ Y ≠ X p ( X ) W ( X → Y ) W ( X → Y ) = T ( X → Y ) A ( X → Y ) \frac{dp(X,\tau)}{d\tau} = \sum_{Y\neq X} p(Y)W(Y\rightarrow X) - \sum_{Y\neq X} p(X)W(X\rightarrow Y)\\
W(X\rightarrow Y) = T(X\rightarrow Y) A(X\rightarrow Y)
d τ d p ( X , τ ) = Y = X ∑ p ( Y ) W ( Y → X ) − Y = X ∑ p ( X ) W ( X → Y ) W ( X → Y ) = T ( X → Y ) A ( X → Y )
A ( X → Y ) A(X\rightarrow Y) A ( X → Y ) X X X Y Y Y
T ( X → Y ) T(X\rightarrow Y) T ( X → Y ) X X X Y Y Y
ergodicity: $\forall X,Y: W(X\rightarrow Y) > 0 $
normalization: ∑ Y W ( X → Y ) = 1 \sum_Y W(X\rightarrow Y) = 1 ∑ Y W ( X → Y ) = 1
homogeneity: ∑ Y p ( Y ) W ( Y → X ) = p ( X ) \sum_Y p(Y)W(Y\rightarrow X) = p(X) ∑ Y p ( Y ) W ( Y → X ) = p ( X )
Detailed Balance : d p ( X , τ ) d τ = 0 \frac{d~p(X,\tau)}{d\tau} = 0 d τ d p ( X , τ ) = 0
M(RT)^2^ Algorithm
random choose a configuration X X X
compute Δ E = E ( Y ) − E ( X ) \Delta E = E(Y) - E(X) Δ E = E ( Y ) − E ( X )
spinflip if Δ E < 0 \Delta E < 0 Δ E < 0 e x p ( − Δ E k B T ) exp(-\frac{\Delta E}{k_BT}) e x p ( − k B T Δ E )
Ising Model
simulate the magnetic properties of a material
H = − J ∑ i , j S i S j − H ∑ i S i \mathcal H = - J \sum_{i,j}S_iS_j - H\sum_i S_i
H = − J i , j ∑ S i S j − H i ∑ S i
S i S_i S i i i i
j j j i i i
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 def ising_model (lattice, M, E, J, beta, steps ):""" lattice: np.ndarray[L, L] 1 means spin up, -1 means spin down M: float magnetic field E: float energy J: float coupling constant beta: float inverse of temperature `beta = 1 / T / kB` steps: int """ 0 ]for i in range (steps):0 , L, [2 ])sum ()2 * J * sigma_i * sigma_jmin (1. , exp(-beta * delta_E)) > rand()if accpet:2 *lattice[x, y]1 return M, E
random choose a configuration X X X
compute Δ E = E ( Y ) − E ( X ) = 2 J σ i σ j \Delta E = E(Y) - E(X) = 2J\sigma_i\sigma_j Δ E = E ( Y ) − E ( X ) = 2 J σ i σ j
spinflip if Δ E < 0 \Delta E < 0 Δ E < 0 e x p ( − Δ E k B T ) exp(-\frac{\Delta E}{k_BT}) e x p ( − k B T Δ E )
Multilevel Monte Carlo(MLMC)
E [ P L ] = E [ P 0 ] + ∑ l = 1 L E [ P l − P l − 1 ] \mathbb E[P_L ] = \mathbb E[P_0] + \sum_{l=1}^L \mathbb E [P_l - P_{l-1}]
E [ P L ] = E [ P 0 ] + l = 1 ∑ L E [ P l − P l − 1 ]
N l = μ V l C l C = ∑ l = 1 L C l N l V a r = ∑ l = 1 L V l N l − 1 N_l = \mu \sqrt{\frac{V_l}{C_l}}\\
C = \sum_{l=1}^L C_l N_l \\
Var = \sum_{l=1}^L V_l N^{-1}_l
N l = μ C l V l C = l = 1 ∑ L C l N l Va r = l = 1 ∑ L V l N l − 1
C l C_l C l l l l
V l V_l V l l l l
N l N_l N l l l l
6. Finite Difference
Error
input data error
rounding error
truncation error
simplification in mathematical model
human & machine error
propogation
ε ≈ ∑ i n ( ∂ f ∂ x i ) 2 ε i 2 \varepsilon \approx \sqrt{\sum_{i}^n \left(\frac{\partial f}{\partial x_i}\right)^2\varepsilon_i^2}
ε ≈ i ∑ n ( ∂ x i ∂ f ) 2 ε i 2
Partial Differential Equation (PDE)
parabolic : D ∂ 2 ϕ ∂ 2 x − ∂ ϕ ∂ t = 0 D\frac{\partial ^2 \phi}{\partial ^ 2 x} - \frac{\partial \phi}{\partial t} = 0 D ∂ 2 x ∂ 2 ϕ − ∂ t ∂ ϕ = 0
hyperbolic : ∂ 2 ϕ ∂ 2 x − 1 c ∂ 2 ϕ ∂ 2 t = 0 \frac{\partial^2 \phi}{\partial ^2 x} - \frac{1}{c}\frac{\partial^2 \phi}{\partial^2 t} = 0 ∂ 2 x ∂ 2 ϕ − c 1 ∂ 2 t ∂ 2 ϕ = 0
generate solution is ϕ ( x , t ) = α f 0 ( x − c t ) + β g 0 ( x + c t ) \phi(x,t)=\alpha f_0(x-ct)+\beta g_0(x+ct) ϕ ( x , t ) = α f 0 ( x − c t ) + β g 0 ( x + c t )
elliptic : ∇ 2 ϕ = 0 \nabla^2\phi = 0 ∇ 2 ϕ = 0
Lagrange Derivative :
D ϕ D t = ∂ ϕ ∂ t + u → ⋅ ∇ ϕ \frac{D\phi}{Dt} = \frac{\partial \phi}{\partial t} + \overrightarrow u \cdot \nabla \phi
D t D ϕ = ∂ t ∂ ϕ + u ⋅ ∇ ϕ
Forward in Time, Backward in Space (FTBS)
∂ ϕ j n + 1 ∂ t = ϕ j n + 1 − ϕ j n Δ t + O ( Δ t ) ∂ ϕ j n ∂ x = ϕ j n − ϕ j − 1 n Δ x + O ( Δ x ) \begin{aligned}
\frac{\partial \phi^{n+1}_j}{\partial t} &= \frac{\phi_j^{n+1} - \phi_j^{n}}{\Delta t } + \mathcal O(\Delta t )
\\
\frac{\partial \phi^n_j}{\partial x} &= \frac{\phi_j^{n} - \phi_{j-1}^{n}}{\Delta x} + \mathcal O(\Delta x)
\end{aligned}
∂ t ∂ ϕ j n + 1 ∂ x ∂ ϕ j n = Δ t ϕ j n + 1 − ϕ j n + O ( Δ t ) = Δ x ϕ j n − ϕ j − 1 n + O ( Δ x )
first order accurate
explicit
Centred in Time, Centred in Space (CTCS)
∂ ϕ j n ∂ t = ϕ j ( n + 1 ) − ϕ j ( n − 1 ) 2 Δ t + O ( Δ t 2 ) ∂ ϕ j n ∂ x = ϕ j + 1 n − ϕ j − 1 n 2 Δ x + O ( Δ x 2 ) \begin{aligned}
\frac{\partial \phi_j^n}{\partial t } &= \frac{\phi_j^{(n+1)}-\phi_j^{(n-1)}}{2\Delta t} + \mathcal O(\Delta t^2)\\
\frac{\partial \phi_j^n}{\partial x} &= \frac{\phi_{j+1}^n - \phi_{j-1}^n}{2\Delta x} + \mathcal O(\Delta x^2)
\end{aligned}
∂ t ∂ ϕ j n ∂ x ∂ ϕ j n = 2Δ t ϕ j ( n + 1 ) − ϕ j ( n − 1 ) + O ( Δ t 2 ) = 2Δ x ϕ j + 1 n − ϕ j − 1 n + O ( Δ x 2 )
second order accurate
implicit
Backward in Time, Centred in Space (BTCS)
∂ ϕ j n ∂ t = ϕ j n + 1 − ϕ j n Δ t + O ( Δ t ) ∂ ϕ j n ∂ x = ϕ j + 1 n − ϕ j − 1 n Δ x + O ( Δ x ) \frac{\partial \phi_j^n}{\partial t} = \frac{\phi_j^{n+1}-\phi_j^n}{\Delta t}+ \mathcal O(\Delta t)\\
\frac{\partial \phi_j^n}{\partial x} = \frac{\phi_{j+1}^n - \phi_{j-1}^n}{\Delta x } + \mathcal O(\Delta x)\\
∂ t ∂ ϕ j n = Δ t ϕ j n + 1 − ϕ j n + O ( Δ t ) ∂ x ∂ ϕ j n = Δ x ϕ j + 1 n − ϕ j − 1 n + O ( Δ x )
first order accurate
implicit
Stability
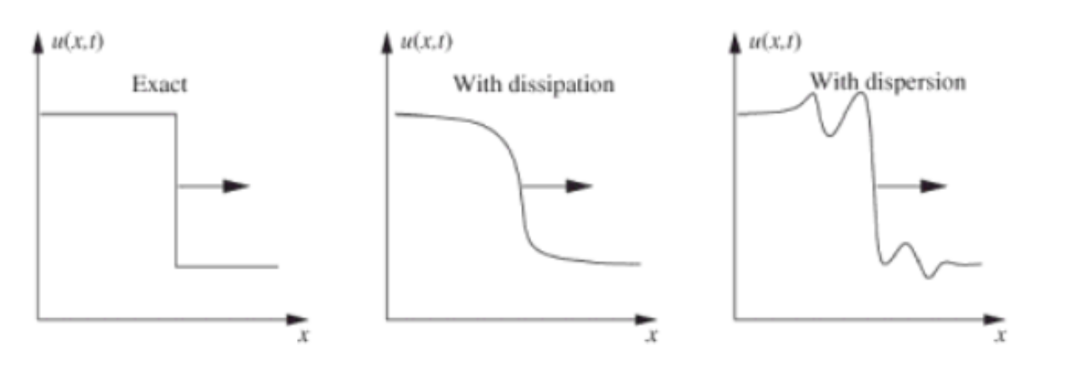
Dissipation : smooth out sharp corners, gradients, discontinuitiesDispersion : dependence of wave speed on wavelength
Lax-Equivalence Theorem
consistency + stability ⇔ \Leftrightarrow ⇔
Courant-Friedrichs-Lewy(CFL) cirterion
C = u Δ t Δ x ≤ C m a x C = \frac{u\Delta t}{\Delta x} \le C_{max}
C = Δ x u Δ t ≤ C ma x
for explicit, C m a x = 1 C_{max} = 1 C ma x = 1
Domain of Dependence(DoD)
DoD for FTBS 0 ≤ c ≤ 1 0\le c \le 1 0 ≤ c ≤ 1
DoD for CTCS − 1 ≤ c ≤ 1 -1 \le c \le 1 − 1 ≤ c ≤ 1
Von-Neumann Stability Analysis
ϕ n + 1 = A ϕ n \phi^{n+1} = A\phi^n
ϕ n + 1 = A ϕ n
∣ A ∣ 2 < 1 |A|^2 < 1 ∣ A ∣ 2 < 1 ∣ A ∣ 2 = 1 |A|^2 = 1 ∣ A ∣ 2 = 1 ∣ A ∣ 2 > 1 |A|^2 > 1 ∣ A ∣ 2 > 1
for FTBS
ϕ j n + 1 = ϕ j n − c ( ϕ j n − ϕ j − 1 n ) A n + 1 e i k j Δ x = A n e e k j Δ x − c A n ( e i k j Δ x − e i k ( j − 1 ) Δ x ) A = 1 − c ( 1 − e − i k Δ x ) ∣ A ∣ 2 = 1 − 2 c ( 1 − c ) ( 1 − c o s k Δ x ) \begin{aligned}
\phi^{n+1}_j &= \phi^n_j - c(\phi^n_j -\phi^n_{j-1})
\\
A^{n+1} e^{ikj\Delta x} &= A^n e^{ekj\Delta x} - cA^n\left(e^{ikj\Delta x}-e^{ik(j-1)\Delta x}\right)
\\
A &= 1 - c(1-e^{-ik\Delta x})
\\
|A|^2 &= 1 - 2c(1-c)(1-cos k \Delta x)
\end{aligned}
ϕ j n + 1 A n + 1 e ikj Δ x A ∣ A ∣ 2 = ϕ j n − c ( ϕ j n − ϕ j − 1 n ) = A n e e kj Δ x − c A n ( e ikj Δ x − e ik ( j − 1 ) Δ x ) = 1 − c ( 1 − e − ik Δ x ) = 1 − 2 c ( 1 − c ) ( 1 − cos k Δ x )
c = u Δ t Δ x c = \frac{u\Delta t}{\Delta x} c = Δ x u Δ t
if $u < 0 $ or u Δ t Δ x > 1 \frac{u\Delta t}{\Delta x} > 1 Δ x u Δ t > 1 0 ≤ c ≤ 1 0\le c\le 1 0 ≤ c ≤ 1
for FTCS
∣ A ∣ 2 = 1 + 4 c 2 s i n 2 ( k Δ x ) |A|^2 = 1 + 4c^2 sin^2(k\Delta x)
∣ A ∣ 2 = 1 + 4 c 2 s i n 2 ( k Δ x )
for CTCS
ϕ j n + 1 = ϕ j n − 1 − c ( ϕ j + 1 n − ϕ j − 1 n ) A = − i c s i n ( k Δ x ) ± 1 − c 2 s i n 2 k Δ x ∣ A ∣ 2 = 2 c 2 s i n 2 ( k Δ x ) − 1 ∓ s i n ( k Δ x ) c 2 s i n 2 ( k Δ x ) − 1 \begin{aligned}
\phi_j^{n+1} &= \phi_j^{n-1}- c(\phi_{j+1}^n - \phi_{j-1}^n)
\\
A & = -ic sin(k\Delta x)\pm \sqrt{1 - c^2 sin^2 k\Delta x}\\
|A|^2 &= 2c^2sin^2(k\Delta x) - 1 \mp sin(k\Delta x)\sqrt{c^2sin^2(k\Delta x) - 1}
\end{aligned}
ϕ j n + 1 A ∣ A ∣ 2 = ϕ j n − 1 − c ( ϕ j + 1 n − ϕ j − 1 n ) = − i cs in ( k Δ x ) ± 1 − c 2 s i n 2 k Δ x = 2 c 2 s i n 2 ( k Δ x ) − 1 ∓ s in ( k Δ x ) c 2 s i n 2 ( k Δ x ) − 1
∣ c ∣ > 1 |c| > 1 ∣ c ∣ > 1 ∣ c ∣ ≤ 1 |c| \le 1 ∣ c ∣ ≤ 1
there are two solutions ,should ignore the spurious solution
Conservation
M n + 1 = ∫ 0 1 ϕ x n + 1 d x = M n = ∫ 0 1 ϕ x n d x \begin{aligned}
M^{n+1} &= \int_0^1 \phi^{n+1}_x dx \\
= M^{n} &= \int_0^1 \phi^n_xdx
\end{aligned}
M n + 1 = M n = ∫ 0 1 ϕ x n + 1 d x = ∫ 0 1 ϕ x n d x
Phase Velocity
ϕ ( x , t ) = ϕ ( x − u t , 0 ) \phi(x,t )= \phi(x-ut,0)
ϕ ( x , t ) = ϕ ( x − u t , 0 )
u u u
for CTCS, small k k k Δ x \Delta x Δ x
Shallow Water Equation
H = H 0 + η H = H_0 + \eta
H = H 0 + η
where H H H η \eta η
∂ u ∂ t + ( u ⋅ ∇ ) u = − 1 ρ ∇ p + g ∇ ⋅ u = 0 \frac{\partial u}{\partial t} + (u \cdot \nabla)u = -\frac{1}{\rho}\nabla p + g\\
\nabla \cdot u = 0
∂ t ∂ u + ( u ⋅ ∇ ) u = − ρ 1 ∇ p + g ∇ ⋅ u = 0
∂ u i ∂ t + u j ∂ u i ∂ x j = − 1 ρ ∂ p ∂ x i + g i ∂ u i ∂ x i = 0 \frac{\partial u_i}{\partial t} + u_j\frac{\partial u_i}{\partial x_j} = -\frac{1}{\rho} \frac{\partial p}{\partial x_i} + g_i
\\
\frac{\partial u_i}{\partial x_i} = 0
∂ t ∂ u i + u j ∂ x j ∂ u i = − ρ 1 ∂ x i ∂ p + g i ∂ x i ∂ u i = 0
where g = [ 0 , 0 , g z ] g = [0, 0, g_z] g = [ 0 , 0 , g z ]
A-Grid(unstaggered)
η j n − η j n − 1 Δ t = − H 0 u j + 1 n − u j − 1 n Δ x u j n + 1 − u j n Δ t = − g η j + 1 n − η j − 1 n Δ x \frac{\eta^n_j - \eta^{n-1}_j}{\Delta t} = - H_0 \frac{u^n_{j+1} - u^n_{j-1}}{\Delta x}
\\
\frac{u^{n+1}_j - u^n_j}{\Delta t} = -g \frac{\eta^n_{j+1} - \eta^n_{j-1}}{\Delta x}
Δ t η j n − η j n − 1 = − H 0 Δ x u j + 1 n − u j − 1 n Δ t u j n + 1 − u j n = − g Δ x η j + 1 n − η j − 1 n
courant number c = g H 0 Δ t Δ x c = \sqrt{gH_0}\frac{\Delta t}{\Delta x} c = g H 0 Δ x Δ t
stable for c ≤ 2 c\le 2 c ≤ 2
**C-Grid(Staggered) **
η j n − η j n − 1 Δ t = − H 0 u j + 1 2 n − u j − 1 n Δ x u j + 1 2 n + 1 − u j + 1 2 n Δ t = − g η j + 1 n − η j − 1 n Δ x \frac{\eta_j^n- \eta^{n-1}_j}{\Delta t} = - H_0\frac{u^n_{j+\frac{1}{2}}-u^n_{j-1}}{\Delta x}
\\
\frac{u^{n+1}_{j+\frac{1}{2}} - u^n_{j+\frac{1}{2}}}{\Delta t} = - g \frac{\eta^n_{j+1} - \eta^n_{j-1}}{\Delta x}
Δ t η j n − η j n − 1 = − H 0 Δ x u j + 2 1 n − u j − 1 n Δ t u j + 2 1 n + 1 − u j + 2 1 n = − g Δ x η j + 1 n − η j − 1 n
stable for c ≤ 1 c\le 1 c ≤ 1
7. Time Integration
error
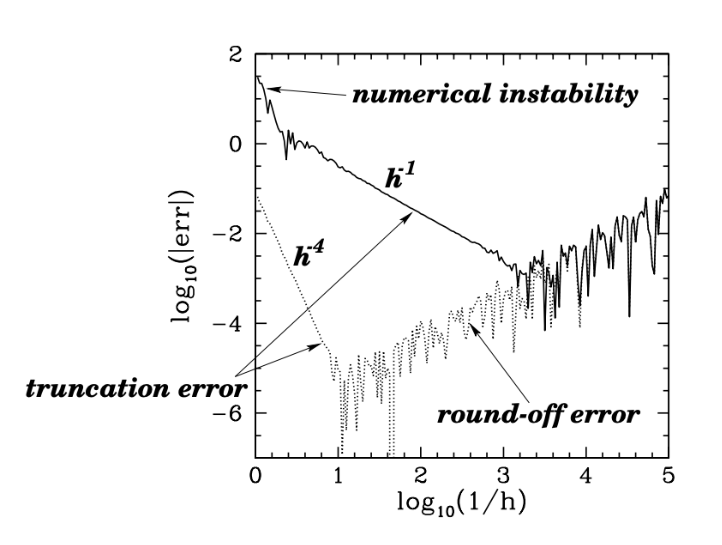
truncation error : taylor expansion in euler method, O ( Δ t 2 ) \mathcal O(\Delta t^2) O ( Δ t 2 ) O ( Δ t ) \mathcal O(\Delta t) O ( Δ t ) round-off error : charcteristic number η \eta η O ( η ) \mathcal O(\eta) O ( η ) O ( η Δ t ) \mathcal O(\frac{\eta}{\Delta t}) O ( Δ t η ) total error : for euler method, ε ∼ η Δ t + Δ t \varepsilon \sim \frac{\eta}{\Delta t} + \Delta t ε ∼ Δ t η + Δ t
one step method
for ordinary differential equatiion (ODE)
∂ ϕ ∂ t = f ( t , ϕ ( t ) ) ϕ ( t 0 ) = ϕ 0 \frac{\partial \phi}{\partial t} = f(t, \phi(t))\quad \phi(t_0) = \phi^0
∂ t ∂ ϕ = f ( t , ϕ ( t )) ϕ ( t 0 ) = ϕ 0
ϕ n + 1 − ϕ n Δ t = γ f ( t + Δ t , ϕ n + 1 ) + ( 1 − γ ) f ( t , ϕ n ) \frac{\phi^{n+1}-\phi ^n}{\Delta t} = \gamma f(t+\Delta t, \phi^{n+1}) + (1-\gamma)f(t,\phi^n)
Δ t ϕ n + 1 − ϕ n = γ f ( t + Δ t , ϕ n + 1 ) + ( 1 − γ ) f ( t , ϕ n )
multi step method
( 1 + β ) ϕ n + 1 − ( 1 + 2 β ) ϕ n + β ϕ n − 1 Δ t = γ f ( t + Δ t , ϕ n + 1 ) + ( 1 − γ + α ) f ( t , ϕ n ) − α f ( t − Δ t , ϕ n − 1 ) \frac{(1+\beta)\phi^{n+1}-(1+2\beta)\phi^n + \beta\phi^{n-1}}{\Delta t} =
\gamma f(t+\Delta t, \phi^{n+1}) + (1-\gamma + \alpha) f(t, \phi^n) - \alpha f(t-\Delta t, \phi^{n-1})
Δ t ( 1 + β ) ϕ n + 1 − ( 1 + 2 β ) ϕ n + β ϕ n − 1 = γ f ( t + Δ t , ϕ n + 1 ) + ( 1 − γ + α ) f ( t , ϕ n ) − α f ( t − Δ t , ϕ n − 1 )
name
α \alpha α β \beta β γ \gamma γ order
explicit euler
0
0
0
1
implicit euer
0
0
1
1
leapfrog
0
− 1 2 -\frac{1}{2} − 2 1 0
2
Runge-Kutta method
k 1 = Δ t f ( t n , ϕ n ) k 2 = Δ t f ( t n + 1 2 , ϕ n + k 1 2 ) k 3 = Δ t f ( t n + 1 2 , ϕ n + k 2 2 ) k 4 = Δ t f ( t n + 1 , ϕ n + k 3 ) ϕ n + 1 = ϕ n + k 1 6 + k 2 3 + k 3 3 + k 4 6 + O ( Δ t 5 ) \begin{aligned}
k_1 &= \Delta tf(t_n, \phi^n) \\
k_2 &= \Delta t f(t_{n+\frac{1}{2}}, \phi^n+\frac{k_1}{2})\\
k_3 &= \Delta t f(t_{n+\frac{1}{2}}, \phi^n+\frac{k_2}{2})\\
k_4 &= \Delta t f(t_{n+1}, \phi^n+k_3)\\
\phi^{n+1} &= \phi^n + \frac{k_1}{6} + \frac{k_2}{3} + \frac{k_3}{3} + \frac{k_4}{6} + \mathcal O(\Delta t^5)
\end{aligned}
k 1 k 2 k 3 k 4 ϕ n + 1 = Δ t f ( t n , ϕ n ) = Δ t f ( t n + 2 1 , ϕ n + 2 k 1 ) = Δ t f ( t n + 2 1 , ϕ n + 2 k 2 ) = Δ t f ( t n + 1 , ϕ n + k 3 ) = ϕ n + 6 k 1 + 3 k 2 + 3 k 3 + 6 k 4 + O ( Δ t 5 )
truncation error O ( Δ t 4 ) \mathcal O(\Delta t^4) O ( Δ t 4 )
round-off error O ( η Δ t ) \mathcal O(\frac{\eta}{\Delta t}) O ( Δ t η )
minimum error is smaller with bigger Δ t \Delta t Δ t
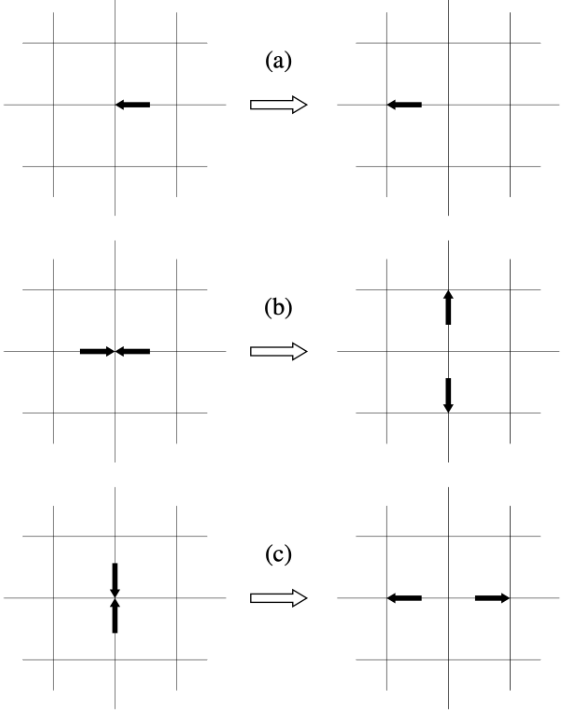
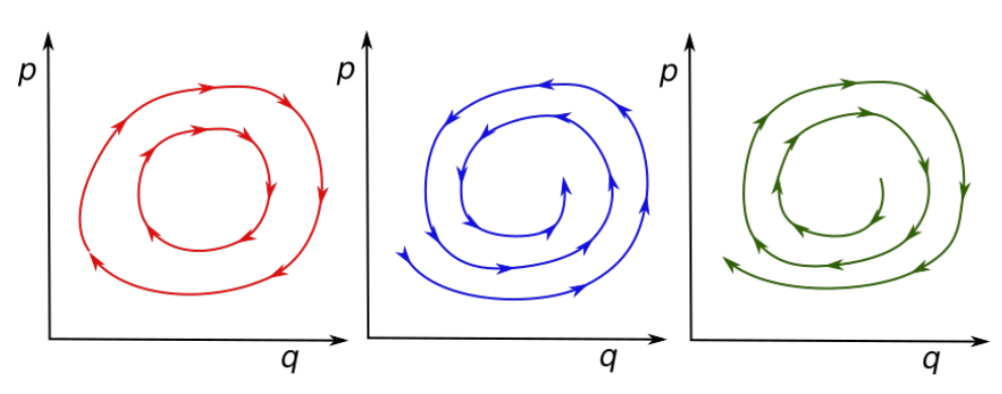
Conservation
volume ↔ \leftrightarrow ↔
left: conserve
middle: loss energy
right: gain energy
Symplectic
for Hamiltonian [ p , q ] [p, q] [ p , q ] p = q ˙ p = \dot q p = q ˙
[ q ( τ ) p ( τ ) ] = A [ q ( 0 ) p ( 0 ) ] \left[\begin{matrix}
q(\tau)\\
p(\tau)
\end{matrix}\right]
= A
\left[\begin{matrix}
q(0)\\
p(0)
\end{matrix}\right]
[ q ( τ ) p ( τ ) ] = A [ q ( 0 ) p ( 0 ) ]
for energy conservation ∣ A ∣ = 1 |A| = 1 ∣ A ∣ = 1
8. Maxwell Equation
Valsov-Maxwell-Bolzmann equation
computational plasma
∂ f s ∂ t + ∇ x ⋅ ( v f s ) + ∇ v ⋅ ( ( E + v × B ) q s f s m s ) = ( ∂ f s ∂ t ) c ∇ ⋅ E = ρ ε 0 ∇ ⋅ H = 0 ∇ × E + ∂ H ∂ t = 0 ∇ × H − μ 0 ε 0 ∂ E ∂ t = μ 0 ∑ s q s ∫ − ∞ ∞ v f s d v 3 \begin{aligned}
\frac{\partial f_s}{\partial t} + \nabla_x \cdot(\boldsymbol vf_s) + \nabla_{\boldsymbol v}\cdot ((\boldsymbol E + \boldsymbol v \times \boldsymbol B)\frac{q_sf_s}{m_s}) &= (\frac{\partial f_s}{\partial t})_c \\
\nabla \cdot \boldsymbol E &= \frac{\rho}{\varepsilon_0}\\
\nabla \cdot \boldsymbol H &= 0 \\
\nabla \times \boldsymbol E + \frac{\partial \boldsymbol H}{\partial t} &= 0\\
\nabla \times \boldsymbol H - \mu_0 \varepsilon_0 \frac{\partial \boldsymbol E}{\partial t} &= \mu_0\sum_s q_s \int_{-\infin}^{\infin} \boldsymbol vf_s d\boldsymbol v^3
\end{aligned}
∂ t ∂ f s + ∇ x ⋅ ( v f s ) + ∇ v ⋅ (( E + v × B ) m s q s f s ) ∇ ⋅ E ∇ ⋅ H ∇ × E + ∂ t ∂ H ∇ × H − μ 0 ε 0 ∂ t ∂ E = ( ∂ t ∂ f s ) c = ε 0 ρ = 0 = 0 = μ 0 s ∑ q s ∫ − ∞ ∞ v f s d v 3
where f ( x , v , t ) ∈ R 3 × 3 × f(x, \boldsymbol v, t)\in \mathbb R^{3\times 3\times} f ( x , v , t ) ∈ R 3 × 3 ×
D = ε 0 ε r E B = μ 0 μ r H \begin{aligned}
\boldsymbol D &= \varepsilon_0\varepsilon_r \boldsymbol E\\
\boldsymbol B &= \mu_0 \mu_r \boldsymbol H
\end{aligned}
D B = ε 0 ε r E = μ 0 μ r H
Particle In Cell Method (PIC)
d x d t = v d v d t = q m ( E ( x , t ) , v × B ( x , t ) ) \begin{aligned}
\frac{d\boldsymbol x}{dt} &= \boldsymbol v\\
\frac{d\boldsymbol v}{dt} &= \frac{q}{m}(\boldsymbol E(\boldsymbol x,t), \boldsymbol v\times \boldsymbol B(\boldsymbol x, t))
\end{aligned}
d t d x d t d v = v = m q ( E ( x , t ) , v × B ( x , t ))
Boris algorithm
v − = v n − 1 2 + q m E n Δ t 2 v + − v − Δ t = q 2 m ( v + + v − ) × B n v n + 1 2 = v + + q m E n Δ t 2 \begin{aligned}
\boldsymbol v^- &= \boldsymbol v^{n-\frac{1}{2}} + \frac{q}{m} \boldsymbol E^n\frac{\Delta t}{2} \\
\frac{\boldsymbol v^+ - \boldsymbol v^-}{\Delta t} &= \frac{q}{2m}(\boldsymbol v^+ + \boldsymbol v^-) \times \boldsymbol B^n\\
\boldsymbol v^{n+\frac{1}{2}} &= \boldsymbol v^+ + \frac{q}{m}\boldsymbol E^n\frac{\Delta t}{2}
\end{aligned}
v − Δ t v + − v − v n + 2 1 = v n − 2 1 + m q E n 2 Δ t = 2 m q ( v + + v − ) × B n = v + + m q E n 2 Δ t
without E \boldsymbol E E
t ≈ q B Δ t 2 m s = 2 t 1 + ∣ t ∣ 2 v ′ = v − + v − × t v + = v − + v ′ × s \begin{aligned}
\boldsymbol t &\approx \frac{q\boldsymbol B \Delta t}{2m}\\
\boldsymbol s &= \frac{2\boldsymbol t}{1 + |\boldsymbol t|^2}\\
\boldsymbol v' &= \boldsymbol v^- + \boldsymbol v^- \times \boldsymbol t\\
\boldsymbol v^+ &= \boldsymbol v^- + \boldsymbol v' \times \boldsymbol s
\end{aligned}
t s v ′ v + ≈ 2 m q B Δ t = 1 + ∣ t ∣ 2 2 t = v − + v − × t = v − + v ′ × s
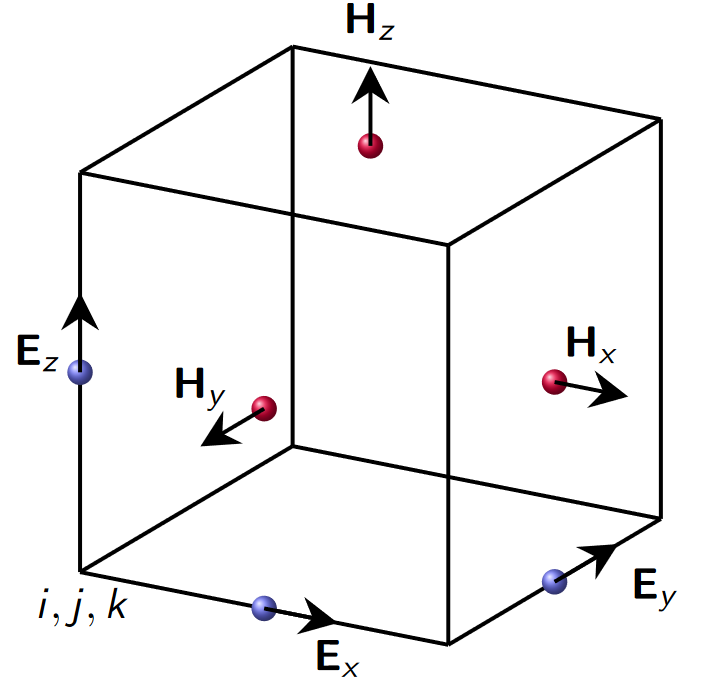
Yee Cell
∂ H ∂ t = − 1 μ 0 ∇ × E ∂ E ∂ t = 1 ε 0 ∇ × H \begin{aligned}
\frac{\partial \boldsymbol H}{\partial t} & = -\frac{1}{\mu_0} \nabla \times \boldsymbol E\\
\frac{\partial \boldsymbol E}{\partial t} &= \frac{1}{\varepsilon_0} \nabla \times \boldsymbol H
\end{aligned}
∂ t ∂ H ∂ t ∂ E = − μ 0 1 ∇ × E = ε 0 1 ∇ × H
∂ H x ∂ t = − 1 μ 0 ( ∂ E y ∂ z − ∂ E z ∂ y ) ∂ E x ∂ t = 1 ε 0 ( ∂ E y ∂ z − ∂ E z ∂ y ) ∂ H y ∂ t = − 1 μ 0 ( ∂ E z ∂ x − ∂ E x ∂ z ) ∂ E y ∂ t = 1 ε 0 ( ∂ E z ∂ x − ∂ E x ∂ z ) ∂ H z ∂ t = − 1 μ 0 ( ∂ E x ∂ y − ∂ E y ∂ x ) ∂ E z ∂ t = 1 ε 0 ( ∂ E x ∂ y − ∂ E y ∂ x ) \begin{aligned}
\frac{\partial \boldsymbol H_x}{\partial t} &= \frac{-1}{\mu_0} \left(\frac{\partial \boldsymbol E_y}{\partial z} - \frac{\partial \boldsymbol E_z}{\partial y}\right)
&
\frac{\partial \boldsymbol E_x}{\partial t} &= \frac{1}{\varepsilon_0}\left(\frac{\partial \boldsymbol E_y}{\partial z} - \frac{\partial \boldsymbol E_z}{\partial y}\right)
\\
\frac{\partial \boldsymbol H_y}{\partial t} &= \frac{-1}{\mu_0}\left(\frac{\partial \boldsymbol E_z}{\partial x} -\frac{\partial \boldsymbol E_x}{\partial z}\right)
&
\frac{\partial \boldsymbol E_y}{\partial t} &=\frac{1}{\varepsilon_0}\left(\frac{\partial \boldsymbol E_z}{\partial x} - \frac{\partial \boldsymbol E_x}{\partial z}\right)
\\
\frac{\partial \boldsymbol H_z}{\partial t} &=\frac{-1}{\mu_0}\left(\frac{\partial \boldsymbol E_x}{\partial y} - \frac{\partial \boldsymbol E_y}{\partial x}\right)
&
\frac{\partial \boldsymbol E_z}{\partial t} & = \frac{1}{\varepsilon_0}\left(\frac{\partial \boldsymbol E_x}{\partial y}-\frac{\partial \boldsymbol E_y}{\partial x}\right)
\end{aligned}
∂ t ∂ H x ∂ t ∂ H y ∂ t ∂ H z = μ 0 − 1 ( ∂ z ∂ E y − ∂ y ∂ E z ) = μ 0 − 1 ( ∂ x ∂ E z − ∂ z ∂ E x ) = μ 0 − 1 ( ∂ y ∂ E x − ∂ x ∂ E y ) ∂ t ∂ E x ∂ t ∂ E y ∂ t ∂ E z = ε 0 1 ( ∂ z ∂ E y − ∂ y ∂ E z ) = ε 0 1 ( ∂ x ∂ E z − ∂ z ∂ E x ) = ε 0 1 ( ∂ y ∂ E x − ∂ x ∂ E y )
E x k n + 1 2 − E x k n − 1 2 Δ t = − 1 ε 0 H y k + 1 2 n − H y k − 1 2 n Δ z H y k + 1 2 n + 1 − H y k + 1 2 n Δ t = − 1 μ 0 E x k + 1 n + 1 2 − E x k n + 1 2 Δ z \frac{E_{x_k}^{n+\frac{1}{2}}-E_{x_k}^{n-\frac{1}{2}}}{\Delta t} = -\frac{1}{\varepsilon_0}\frac{H_{y_{k+\frac{1}{2}}}^n - H_{y_{k-\frac{1}{2}}}^n}{\Delta z}
\\
\frac{H_{y_{k+\frac{1}{2}}}^{n+1}-H_{y_{k+\frac{1}{2}}}^n}{\Delta t} = -\frac{1}{\mu_0}\frac{E_{x_{k+1}}^{n+\frac{1}{2}}-E_{x_k}^{n+\frac{1}{2}}}{\Delta z}
Δ t E x k n + 2 1 − E x k n − 2 1 = − ε 0 1 Δ z H y k + 2 1 n − H y k − 2 1 n Δ t H y k + 2 1 n + 1 − H y k + 2 1 n = − μ 0 1 Δ z E x k + 1 n + 2 1 − E x k n + 2 1
error minimized by E ~ x = ε 0 μ 0 E x \tilde E_{x} = \sqrt{\frac{\varepsilon_0}{\mu_0}}E_x E ~ x = μ 0 ε 0 E x
stability : Δ t Δ x = 1 d c \frac{\Delta t}{\Delta x} = \frac{1}{\sqrt d c} Δ x Δ t = d c 1
9. N-Body Problems
Particle in Cell Method (PIC)
− Δ ϕ = ρ F = − ∇ ϕ -\Delta \phi = \rho\\
F = -\nabla \phi
− Δ ϕ = ρ F = − ∇ ϕ
ρ \rho ρ ϕ \phi ϕ
ϕ ( x ) = G ( x , x ′ ) ∗ ρ ( x ′ ) \phi(x) = G(x,x') * \rho(x')
ϕ ( x ) = G ( x , x ′ ) ∗ ρ ( x ′ )
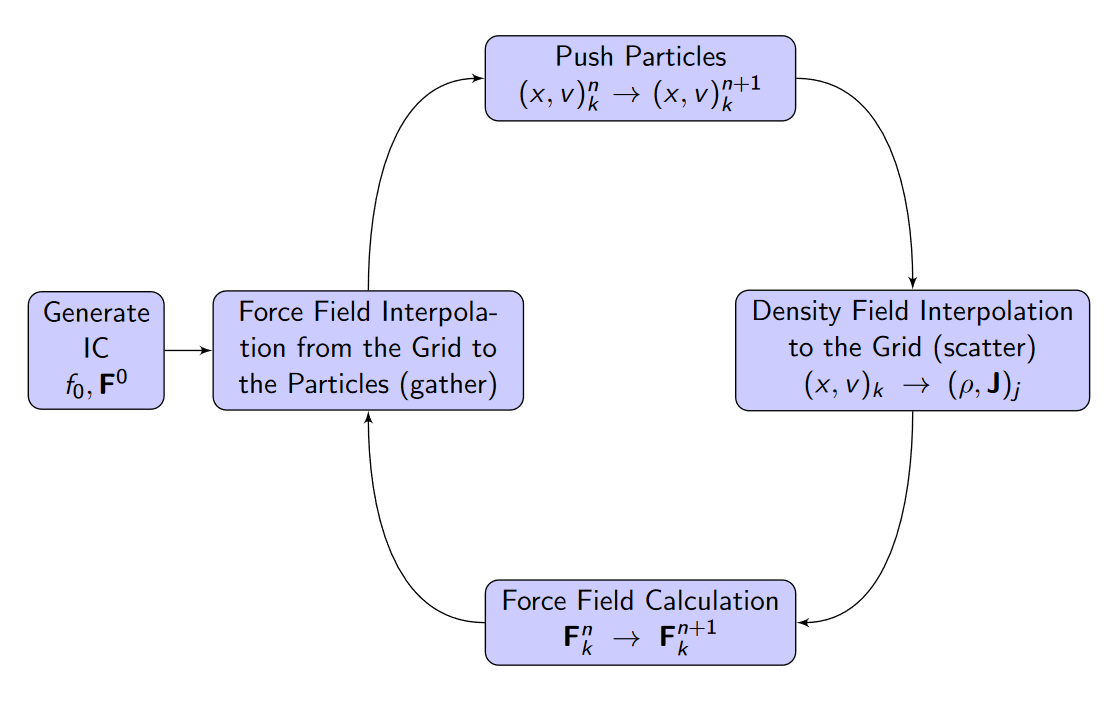
generate initial condition f 0 , F 0 f_0, F^0 f 0 , F 0
for loop
force field interpolate from grid to particles
push particles ( x , v ) k n → ( x , v ) k n + 1 (x,v)^n_k\rightarrow (x,v)^{n+1}_k ( x , v ) k n → ( x , v ) k n + 1
density field interpolation to grid ( x , v ) k → ( ρ , J ) j (x,v)_k \rightarrow (\rho, J)_j ( x , v ) k → ( ρ , J ) j
force field calculation F k n → F k n + 1 F_k^n\rightarrow F_k^{n+1} F k n → F k n + 1
ϕ ( x ) = ∫ ρ ( x ′ ) G ( x , x ′ ) d x ′ = F − 1 ( F ( ρ ) ⋅ F ( G ) ) \phi(x) = \int \rho(x') G(x,x')dx' = \mathcal F^{-1}(\mathcal F(\rho) \cdot \mathcal F(G)) ϕ ( x ) = ∫ ρ ( x ′ ) G ( x , x ′ ) d x ′ = F − 1 ( F ( ρ ) ⋅ F ( G ))
Particle particle Particle Mesh(P3M)
G ( r ) = 1 − e r f ( α r ) r ⏟ G p p + e r f ( α r ) r ⏟ G p m G(r) = \underbrace{\frac{1-erf(\alpha r)}{r}}_{G_{pp}} + \underbrace{\frac{erf(\alpha r)}{r}}_{G_{pm}}
G ( r ) = G pp r 1 − er f ( α r ) + G p m r er f ( α r )
G p p G_{pp} G pp
G p m G_{pm} G p m